[비교과 프로그램 모집]모션캡처를 활용한 Passive Walker 제작 및 실습
- 글번호
- 399171
- 작성일
- 2024-12-27
- 수정일
- 2024-12-27
- 작성자
- 바이오-로봇시스템공학과
- 조회수
- 610
모션캡처를 활용한 Passive Walker 제작 및 실습
|
프로그램명 |
모션캡처를 활용한 Passive Walker 제작 및 실습 |
|
모집 대상 |
바이오-로봇시스템공학과 3~4학년 재학생 |
|
모집 인원 |
6명 / 3인1팀 (초과 시 별도 면접 진행) |
|
운영 기간 |
겨울방학 중 (2025. 01. 03. ~ 2025. 02. 21.) |
|
담당 교수 |
바이오-로봇시스템공학과 박기원, 박상인, 김우용 |
○ 주요 교육 내용
Introductions
- Walking mechanisms are fundamental in robotics, especially for applications involving mobility, stability, and energy efficiency.
- A passive walker is a type of robot that walks down a slight slope without any motors, actuators, or active control mechanisms, relying solely on gravity, mechanical design, and natural dynamics to move.
- Connecting the passive walker to the human walking mechanism can deepen students' understanding of bio-mechanics and robotics design principles.
Outcomes
- Understanding of Bio-mechanics and robot systems
- Hands-on-skills in making and testing physical prototypes
- Capability in building simulator and analyzing the results
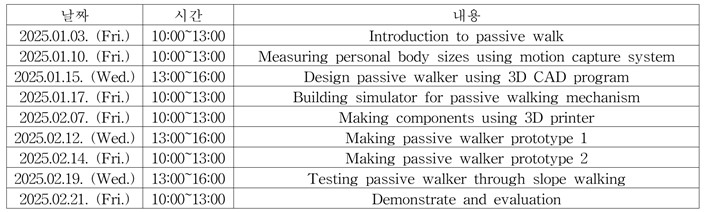
Schedules and Contents
- Note that this schedule is subject to change.
- Any updates will be communicated after the opening.
○ 신청 방법 및 문의
|
신청방법 |
12월 31일 까지 김우용 교수 개인 메일(wooyongkim@inu.ac.kr)로 신청 |
|
문의 |
프로그램 담당교수: 바이오-로봇시스템공학과 김우용 (032-835-8688) |